Cześć
Chcę zbudować napęd z płynną regulacją prędkości silnika, gdzie mógłbym tą prędkość ustawiać z poziomu HA najlepiej NodeRed. Myślałem wstępnie o wemos d1mini z a4988 i silnikiem Nema 17, ale coś mi się wydaję że uzyskam tylko włącz i wyłącz.
I teraz jest pytanie czy iść w stronę silników krokowych, czy pozostaje analogowy i sterowanie napięciem?
Może ktoś ma taki układ już zrobiony?
Wiele zależy od tego co chcesz napędzać tym silnikiem. Oprócz regulacji prędkości ważny jest moment obrotowy i moc. Od tego należy zacząć a następny będzie dobór sterowania. Ciężko podpowiadać rozwiązania jak nie znamy parametrów i konstrukcji silnika.
W silnikach krokowych prędkość regulujesz podając do sterownika ilość kroków na sekundę.
Nie wiem jakie prędkości obrotowe ma mieć ten silnik, ale jeśli chodzi o silniki krokowe, to można łatwo to zintegrować z HA poprzez ESPHome. Nie znam Tasmoty, widzę że też ma obsługę A4988
Czy możecie mi doradzić o co chodzi w poniższym przypadku? nie do końca rozumiem o co chodzi z tą kompilacją, co należy zrobić. Po wgraniu tasmoty wersji mega mam możliwość ustawienia a4988
tasmota a4988
Chodzi o skompilowanie, czyli zbudowanie z kodu źródłowego projektu Tasmota własnego pliku bin.
Są na to różne metody. Jeśli nie maiłeś z tym nigdy styczności, to proponuję wykorzystać webowe narzędzie Tasmo Compiler:
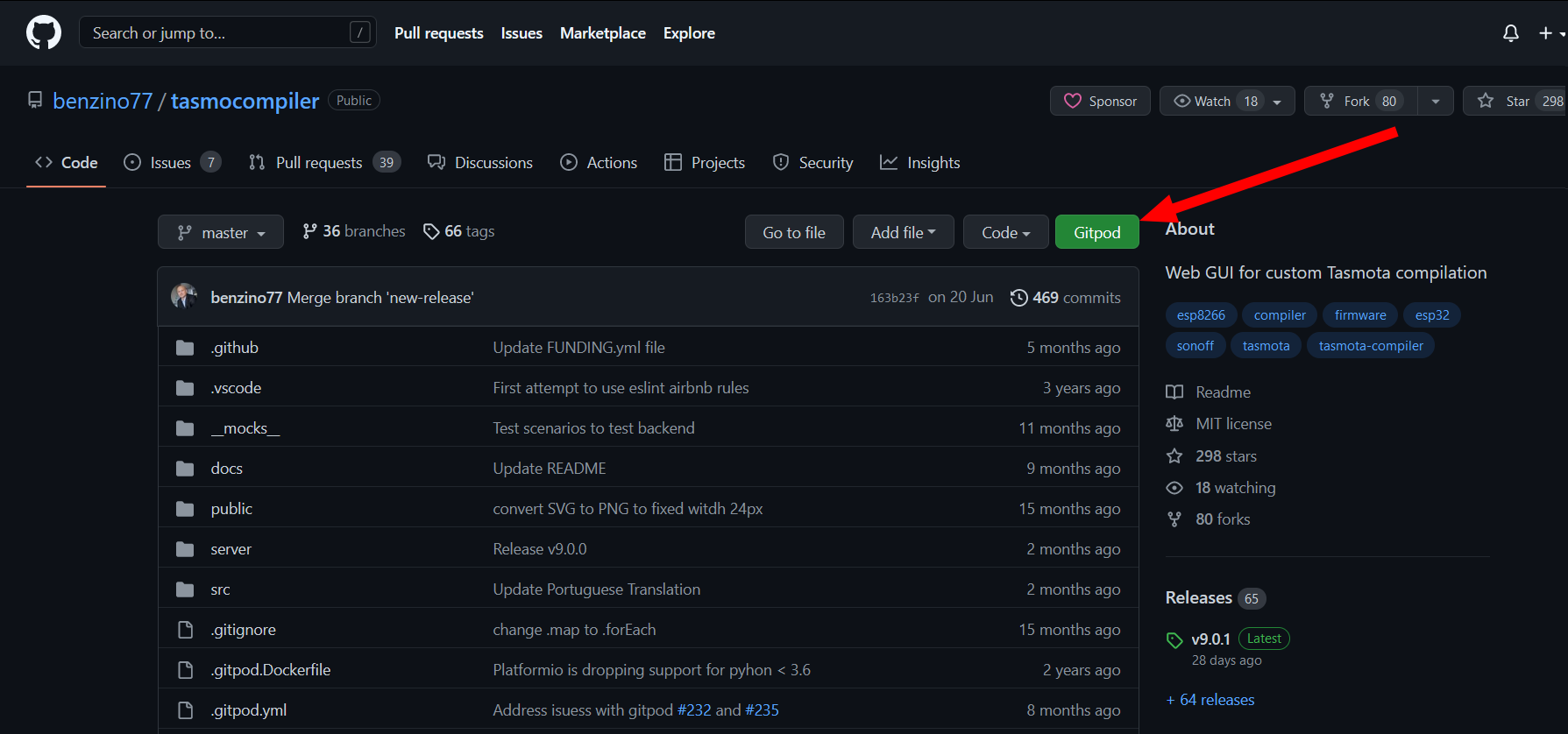
GitHub - benzino77/tasmocompiler: Web GUI for custom Tasmota compilation
Potrzebne będzie konto na GitHub i dostęp do internetu.
Klikasz na przycisk Gitpod i zostajesz poproszony o zalogowanie się do tej platformy. Tu przydaje się właśnie konto na GitHub.
Projekt (kontener w chmurze) uruchamia się, możesz śledzić postęp w konsoli… po chwili w przeglądarce mam komunikat z prośbą o pozwolenie na otwarcie nowego okna.

Zezwalam na nowe okno i pojawia się webowe UI do konfiguracji oprogramowania Tasmota dla zbudowania własnego pliku wsadowego do ESP.
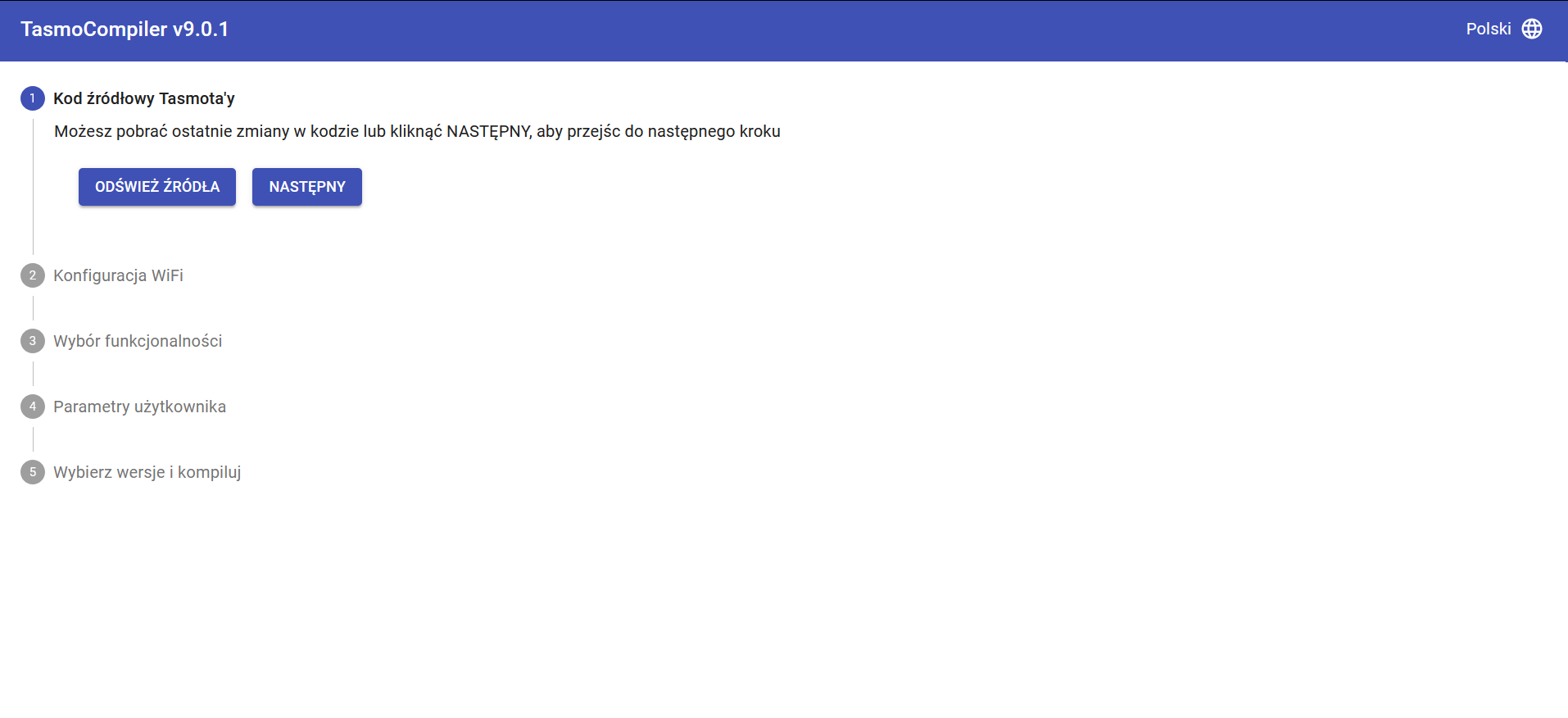
Wybierasz płytkę, funkcje i klikasz następny…
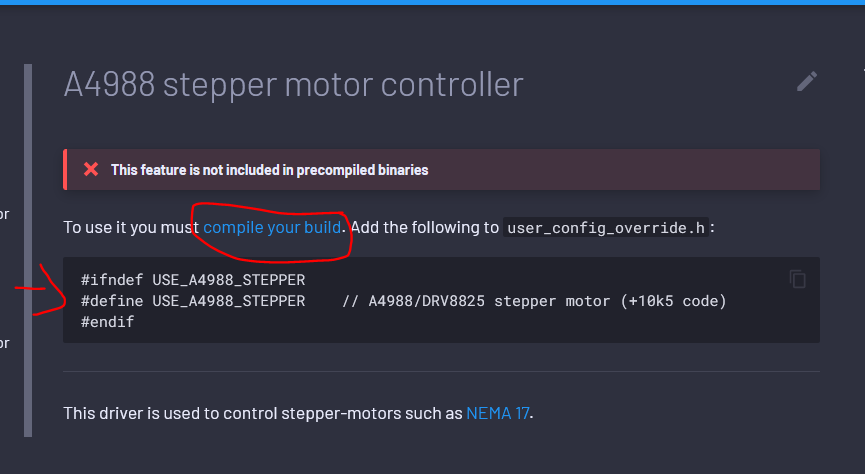
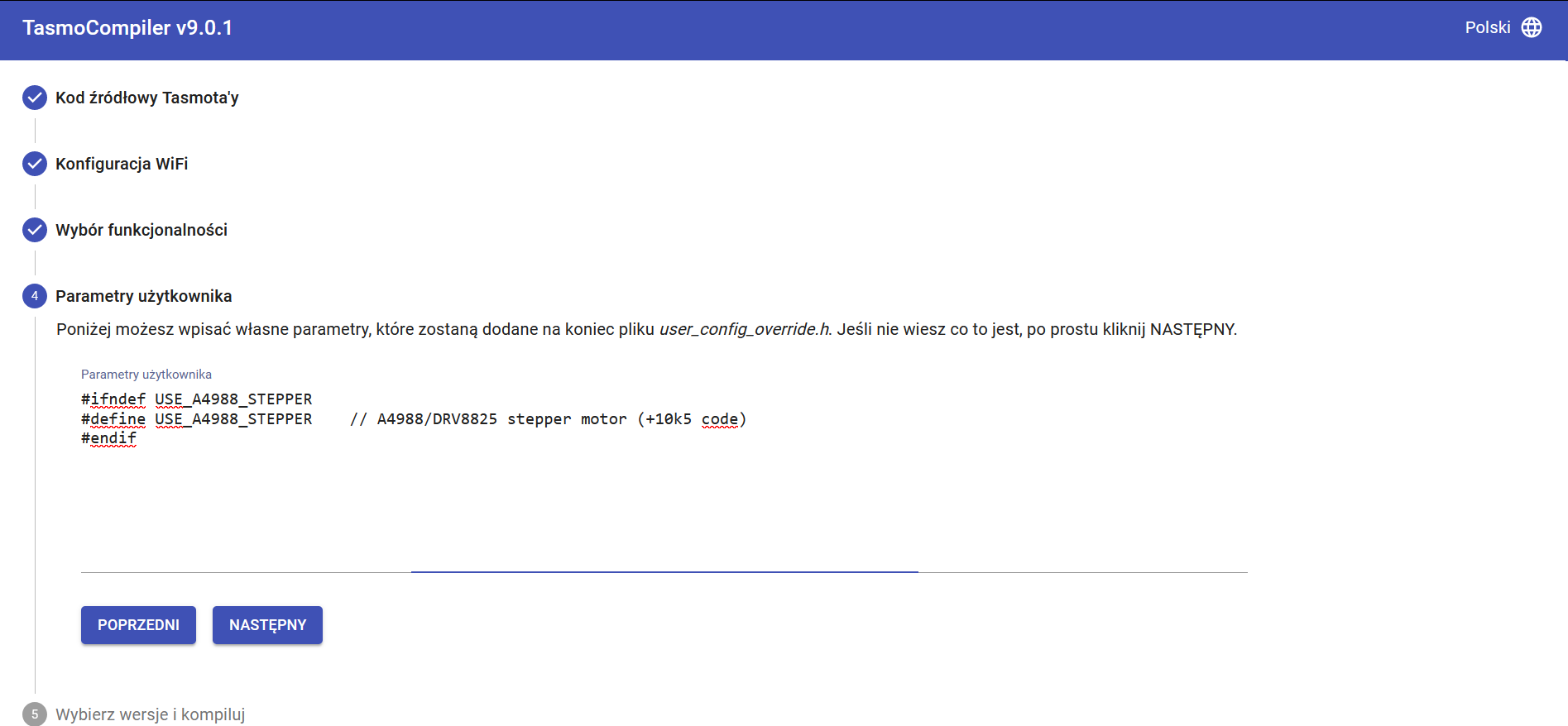
W zakładce “parametry użytkownika” podajesz właśnie wiersze dla obsługi A4988:
#ifndef USE_A4988_STEPPER
#define USE_A4988_STEPPER // A4988/DRV8825 stepper motor (+10k5 code)
#endif
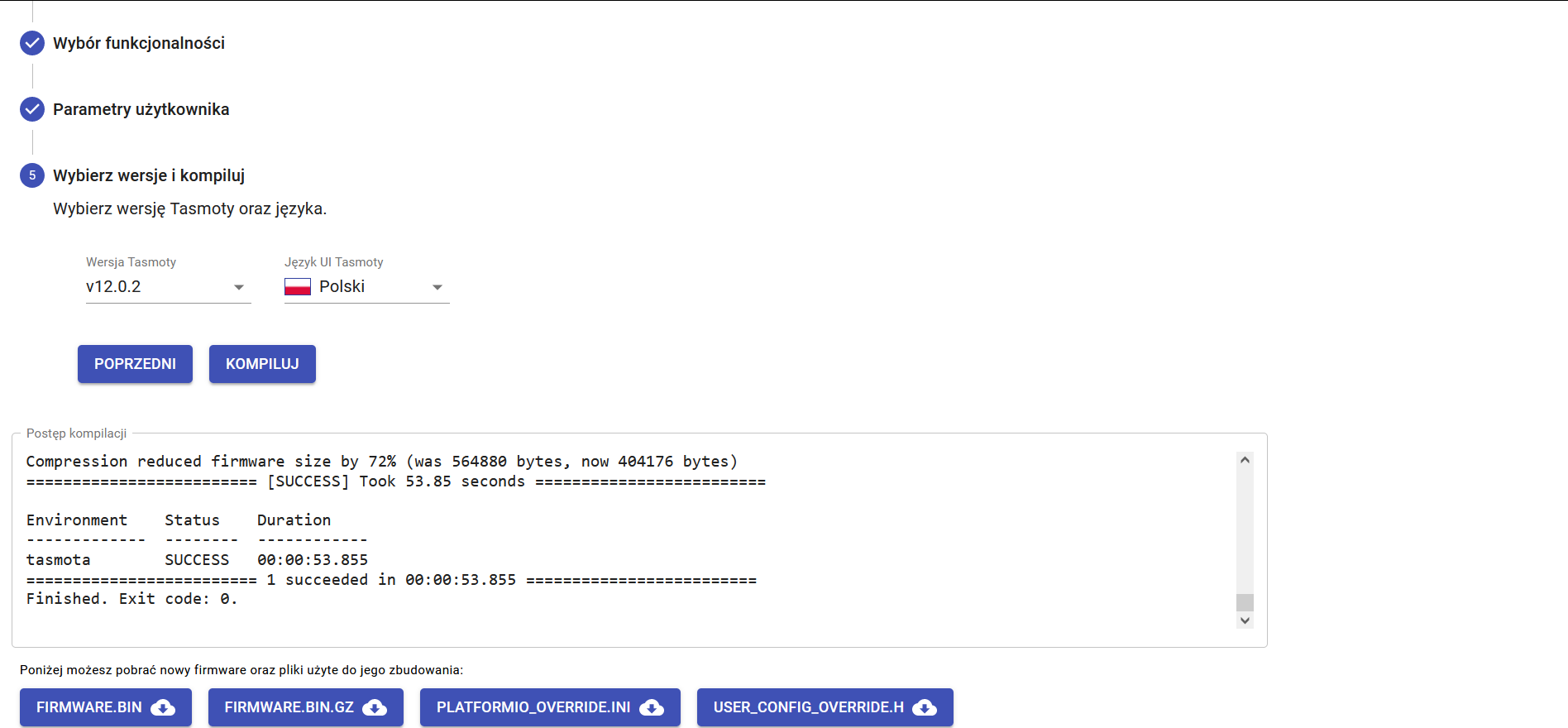
Kompilacja i Voilà, gotowy plik do pobrania i wgrania do ESP: