Cześć
Uruchomilem dodatek HA TORQUE. Wszystko działa poprawnie jakby ktoś potrzebowal pomocy w konfiguracji to prosze pisac, ale mam jeden problem (jak na razie ![]() ).
).
Dostaje osobne encje ze wszystkich czujnikow i tu akurat jest OK. Niestety dlugosci i szerokosci GPS tez sa to dwie osobne encje i nie jestem w stanie wprowadzic lokalizacji samochodu na mapy tak jak np encje person. Probowalem zrobic to szablonem aby stworzyc encje np. GPS
i niestety nie jestem w stanie. Moze ktos juz ogarnial ten dodatek i ma to połapane? Pozdrawiam
![]() Sprawa trochę skomplikowana ponieważ nie mam do dyspozycji sensorów GPS tylko ich atrybuty.
Sprawa trochę skomplikowana ponieważ nie mam do dyspozycji sensorów GPS tylko ich atrybuty.
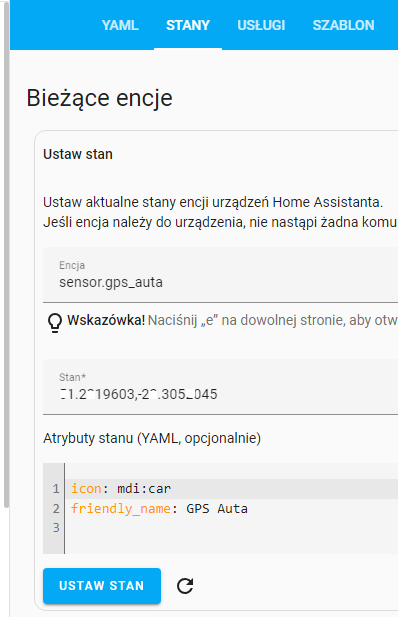
Sam sensor który łączy dwa sensory lokalizacyjne w całość wygląda tak:
- platform: template
sensors:
gps_auta:
friendly_name: "GPS Auta"
value_template: "{{ state_attr('person.xxxx','latitude') }},{{state_attr('person.xxxx','longitude') }}"
icon_template: mdi:car
Wynikiem tego jest
![]() Ty masz sensory to wpisz w ten sposób::
Ty masz sensory to wpisz w ten sposób::
value_template: "{{ states('sensor.dlugosc_gps') }},{{ states('sensor.szerokosc_gps') }}"
/
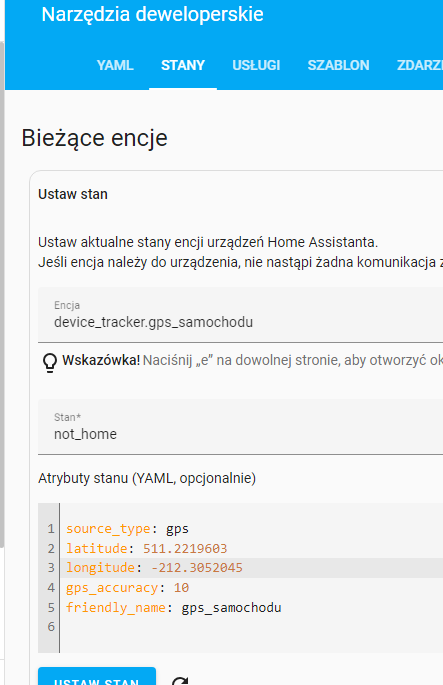
Dodanie sensora o śledzenia:

service: device_tracker.see
data:
dev_id: gps_samochodu
gps:
- "{{ state_attr('person.xxxx', 'latitude') | float(default=0) }}"
- "{{ state_attr('person.xxxx', 'longitude') | float(default=0) }}"
:information_source:
gps_accuracy: 10
![]() Musisz zmienić tak jak wyżej na sensory
Musisz zmienić tak jak wyżej na sensory
Po wywołaniu usługi w known_devices.yaml pojawi się wpis:
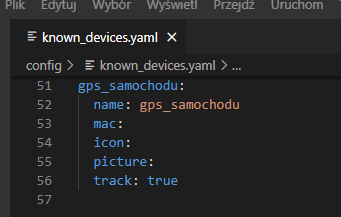
Wynikiem tego jest “tracker”
![]() A jego można dodać do mapy czy wykorzystać do automatyki, skryptów itp.
A jego można dodać do mapy czy wykorzystać do automatyki, skryptów itp.
/
![]() Czy obędzie działać nie wiem, mam nadzieje że tak.
Czy obędzie działać nie wiem, mam nadzieje że tak.
Jedynie co mnie zastanawia to czy “tracker” będą się uaktualniał czy potrzebują jakiegoś wyzwalacza.
![]() Jeśli zdecydujesz się na wykorzystanie tych wypocin to daj znać czy działa .
Jeśli zdecydujesz się na wykorzystanie tych wypocin to daj znać czy działa .
Jeśli znalazłeś inny sposób to się podziel.
Cześć
Wszystko działa tak jak opisałeś. Naszukałem się po internecie i ciągle coś było nie tak.
Jeszcze raz bardzo dziękuję
Ps. jeżeli wypali mi w jakiś sensowny i mało zawodny sposób komunikacji dwustronnej z samochodem po OBD, na pewno napiszę. Naprawde bardzo dziekuje
Mam jeszcze pytanie w sprawie wywolywania tej uslugi sledzenia (service: device_tracker.see).
Czy jest jakis prosty sposob na aktualizownaie danych tej uslugi.
Niestety dane pozycji na mapie aktualizuja sie tylko w momencie wywolania tej uslugi
Na pewno możesz wywołać automatyzacją
Szablon czasu np. 10 sekund , warunek (np. w samochodzie) , usługa device_tracker.see i reszta kodu
Nie wiem czy dobrze kombinuje, ale do stwierdzenia przez system, ze jestem np. w samochodzie potrzebuje aktualnej jego pozycji a to probuje wlasnie uzyskac.
Moze istnieje sposob na wyciagniecie informacji ze stan danej encji (w tym przypadku np. longitude lub latitude ) sie zmienil i potraktowac ta informacje jako wyzwalacz do automatyzacji ktora wywolywalaby usluge device_tracker.see. Takie luzne przemyslenia - czy wogole da sie tak zrobic?
Możesz wykorzystać inne sensory “OBD” np. wzrost napięcia, temperaturę silnika czy obroty silnika.
Parę miesięcy temu miałem Torque, to “w samochodzie” wykorzystywałem połączenie BT ( telefon z samochodem (radiem)).
![]() Dlaczego nie wykorzystujesz lokalizacji z telefonu ?- łatwe, proste i przyjemne
Dlaczego nie wykorzystujesz lokalizacji z telefonu ?- łatwe, proste i przyjemne ![]()
/
Miałem integracji Torque to miałem skonfigurowane tak:
Wsiadam do auta
Telefon łączy się z OBD przez BT (jestem w samochodzie)
Kiedy zostało ustanowione połączenie z poziomu HA została wysłana komenda "włącz aplikacje Torque na telefonie.
Następna komenda z poziomu HA to włącz dokładną lokalizacje np. wysyłaj lokalizacje z dokładnością 20 metrów.
Po zakończeniu jazdy:
Rozłączenie BT z samochodem - Komenda z poziomu HA “wyłącz dokładną lokalizacje”
/
Zajrzyj tutaj, zobacz jak ustawienia są wstanie zmienić dokładność wskazań lokalizacji
Telefon będzie na stale w samochodzie, dlatego nie mogę wyciągnąć informacji o wystąpieniu zdarzenia takiego jak polaczenie oprogramowania z obd ![]()
Mogę oczywiście wyciągnąć informacje z telefonu “pokładowego” o jego lokalizacji ale nie wiem dlaczego jest to odczyt bardzo kiepskiej dokładności i na dodatek często się chwilowo (kilka a nawet kilkanaście minut) zawiesza. Natomiast odczyt z gps samochodu jest bardzo dokładny i nie mam na nim przerw - home assistant pokazuje mi każdą zmianę długości i szerokości geograficznej bardzo dokładnie, ale są to odczyty osobne (dl i szer). Dlatego te wszystkie próby
Edytowane:
W sumie to masz racje i można wyciągnąć wyzwolenie z jakiejś encji z OBD odczytującej np napięcie instalacji w samochodzie ( > 13,2) po odpaleniu silnika i uruchomić odświeżanie service: device_tracker.see. Ciągle tylko mam w głowie rzecz taką, że to nie zadziała gdy np samochód będzie gdzieś na parkingu (czyli poza wszelkimi zdefiniowanymi strefami) i zostanie skradziony bez odpalania silnika i nie odświeży lokalizacji. (Wiem - można wyciągnąć informacje z telefonu z akceleracji po ruszeniu samochodem lub jego uderzeniu, ale wciąż najbardziej do mnie przemawia ten GPS z systemu tego pojazdu) Szkoda byłoby nie wykorzystać takich możliwości jeżeli tylko się da je wyciągnąć.
A czy istnieje taki skrypt usługa czy coś już zaimplementowanego w systemie aby odczytał i zapisał wartość encji i za np 10 sekund odczytał ponownie i porównał zapisana wartość z ta świeżo odczytaną i gdy będą się różnić wywołać akcję ?
Zerknąłeś na linka który udostępniłem?
Co do zapisu wartości to w HA służy pomocnik input_text:
Następnie można porównać wartości:
value_template: "{{ states('sensor.lokalizacja') != states('input_text.zapisana_lokalizaja') }}"
Ale z GPS mogą być problemy, ponieważ odczyty mogą wprowadzać w błąd ( dokładność odczytu - tolerancja).
Oczywiści można wartość sensorów (GPS) zaokrąglić do wartości np. do 4 po “kropce” ale czy w czasie jazdy będzie oznaczony samochód że jest na drodze ![]()
Na pewno jest to do zrobienia ale jak widzisz będzie wiele zmiennych, Twoja konfiguracja +“pomocnik” + automatyzacja .
Jeśli w którymś kodzie nie uwzględni się poprawnych odczytów lub ich brak, zwłoki z przesłaniem danych do HA itp. będziesz miał wiele fałszywych alarmów lub nie będziesz pewny że działa w 100% poprawnie.
A możesz podać linka do aplikacji? Bo po wpisaniu torque w ios appstore dzieje się dramat tyle tego jest.
Na iOS raczej nie ma tej aplikacji
2020
The actual Torque app that everyone is familiar with is from Ian Hawkins. As far as I can tell, all those other apps on the app store are fakes, ripoffs or just trying to cash in on the Torque name. As far as I know, Ian Hawkins has not released an iOS version. (Hope I’m wrong though!)
Tak przy okazji, jest też integracja niestandardowa torque-logger.
U mnie zastąpiła oficjalną bo ma dwa duże plusy, pierwszy to zapamiętywanie parametrów po restarcie HA, drugi to pokazuje mi procentowe napełnienie baku, czego w oficjalnej apce nie dało rady wyciągnąć.

A już tak kompletnie przy okazji, czy w PL jest jakaś strona z bieżącymi cenami paliw? Bo jak na razie to udało mi się znaleźć tylko dane ze strony autocentrum:
https://www.autocentrum.pl/paliwa/ceny-paliw/lodzkie/
No ale cena to średnia dla całego województwa, widać trend ale porównać ceny z najbliższych stacji nie można.
Poziom paliwa (procentowy, torque-logger)
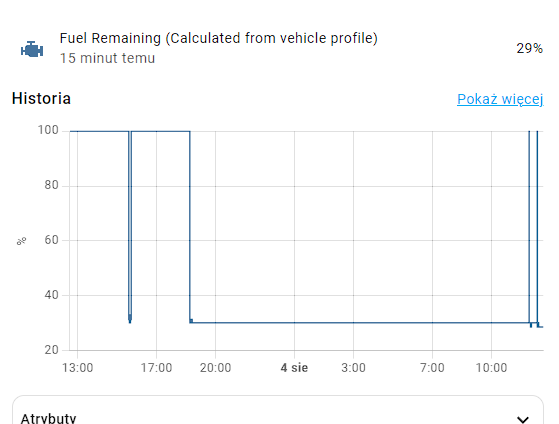
Czy w Twojej konfiguracji też masz tak, że nieraz odczyt pozostaje po wyłączeniu silnika a innym razem przybiera wartość 100% ?
Inny sensor działają poprawnie
Tak, też mam takie skoki do 100%, ale staram się wyłączać apkę torque przed wyjściem z samochodu ale już po wyłączeniu silnika i zauważyłem że jest mniej takich anomalii.
torque-logger
Po ostatniej aktualizacji przestała działać. ![]()
Nadal korzystasz, czy znalazłeś rozwiązanie?
Jeszcze jestem na wersji 2024.11, będę miał chwilę to zerknę na tą integrację.
Edycja:
Sprawdź czy to zadziała, na razie na szybko robiłem i dzisiaj nie mam jak przetestować.
W katalogu custom_components torque_logger znajdź api.py i podmień linijki na początku na te:
"""Torque Logger API Client/DataView."""
from typing import TYPE_CHECKING
import logging
import pint
from homeassistant.components.http import HomeAssistantView
from homeassistant.core import callback
from homeassistant.util import slugify
# Add these imports to handle potential NumPy issues
import numpy as np
np.cumproduct = np.cumprod # Patch the deprecated function
from .const import TORQUE_GPS_ACCURACY, TORQUE_GPS_ALTITUDE, TORQUE_GPS_LAT, TORQUE_GPS_LON
wszystko poniżej linijki from .const import zostaw jak było. Potem w manifest.json podmień to co jest na to:
{
"domain": "torque_logger",
"name": "Torque Logger",
"documentation": "https://github.com/junalmeida/homeassistant-torque#readme",
"iot_class": "local_push",
"issue_tracker": "https://github.com/junalmeida/homeassistant-torque/issues",
"version": "0.0.0",
"config_flow": true,
"dependencies": [
"http"
],
"requirements": [
"pint>=0.24"
],
"codeowners": [
"@junalmeida"
]
}
Zapisz i restart HA, powinno ruszyć. Ewentualnie skasuj integrację i dodaj mój fork jako custom repository w HACS i zainstaluj
https://github.com/DominikWrobel/homeassistant-torque
Jeśli podoba Ci się podoba moja pomoc wesprzyj mnie poprzez:

2 polubienia
Działa wyśmienicie
Dziękuje ![]()
1 polubienie
Zobaczymy czy autor będzie chciał aktualizować integrację, jak się nie odezwie do będę starał się ją utrzymać w moim forku ![]()
Edycja:
Wypuściłem wersję v1.2.b jest to beta bo dopiero we wtorek będę mógł przetestować na moim głównym systemie, ale na testowym wszystko działa. Zmieniłem kod aby nie było żadnych ostrzeżeń w HA, integracja w teorii powinna działać przynajmniej do końca przyszłego roku ![]()
https://github.com/DominikWrobel/homeassistant-torque/releases
Zachęcam do testowania.
1 polubienie
v1.2.b
Mam 4 wpisy w logach:
Detected code that calls async_forward_entry_setup for integration, torque_logger with title: Torque Logger and entry_id: 01JEHC89ZVZ6KAY5BB0XBN3KRF, which is deprecated, await async_forward_entry_setups instead. This will stop working in Home Assistant 2025.6, please report this issue
Detected code that calls async_forward_entry_setup for integration torque_logger with title: Torque Logger and entry_id: 01JEHC89ZVZ6KAY5BB0XBN3KRF, during setup without awaiting async_forward_entry_setup, which can cause the setup lock to be released before the setup is done. This will stop working in Home Assistant 2025.1, please report this issue
.
Detected that custom integration 'torque_logger' calls `async_add_job`, which should be reviewed against https://developers.home-assistant.io/blog/2024/03/13/deprecate_add_run_job for replacement options at custom_components/torque_logger/__init__.py, line 51: hass.async_add_job(. This will stop working in Home Assistant 2025.4, please create a bug report at https://github.com/junalmeida/homeassistant-torque/issues`
SOURCE_TYPE_GPS was used from torque_logger, this is a deprecated constant which will be removed in HA Core 2025.1. Use SourceType.GPS instead, please report it to the author of the 'torque_logger' custom integration
Config was used from torque_logger, this is a deprecated alias which will be removed in HA Core 2025.11. Use homeassistant.core_config.Config instead, please report it to the author of the 'torque_logger' custom integration
Sensory widoczne.
Sprawdzę jutro w trasie. Może po synchronizacji i otrzymaniu nowych wartości wpisy znikną ![]()
/
v1.2.1
Logi, czyste ![]()
1 polubienie
Nie, coś jest nie tak, jutro sprawdzę bo już późno.
Jednak znalazłem błąd v1.2.1 powinna działać i instalować się bez problemów
v1.2 wypuszczona, przetestowałem u siebie i wszystko działa jak należy, żadnych problemów w logach nie zgłasza.
1 polubienie