nie spać tylko poczytać o podstawach linuxa 
wtedy się dowiesz czemu ustawienie atrybutów na 777 jest szczególnie słabym pomysłem
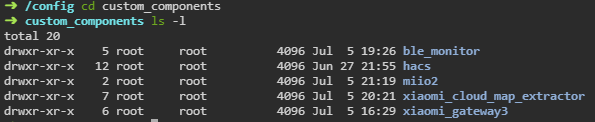
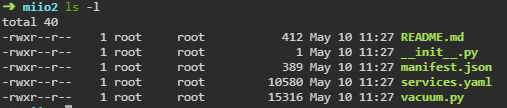
ech znowu jakiś błąd którego nie widzę, foldery wyglądają tak:
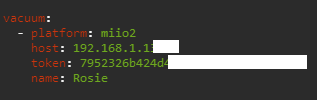
wpis w configuration.yaml wygląda tak
Komunikat mam taki
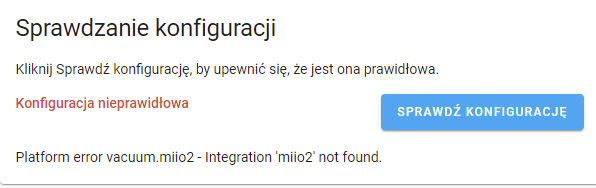
Co znowu skopałem?
Nic, prawdopodobnie dodatek jest “niekompatybilny” z obecnie obowiazującą wymaganą konfiguracją HA, też tak mam z Dekoder WIFI PREMIUMBOX+ z Canal+, nie miałem czasu tego analizować, po prostu musiałem usunać.
Odsyłam do dokumentacji: Custom integration changes | Home Assistant Developer Docs, u mnie nie pomogło.
Nie wiem, ale czy musimy zgadywać co tam instalujesz?
Zakładam, że to
wygląda na to że pierwotny developer projektu go niemal porzucił
a teraz popatrz - projekt ma prawie 100 forków (możesz mieć własny i w nim wprowadzić poprawki, ale czasem ktoś dba o aktualizacje w swoim forku i może wystarczy, że stamtąd zainstalujesz)
są też “nieprzyklepane” PR (tam możesz znaleźć jakieś poprawki, które może ożywią integrację)
https://github.com/nqkdev/home-assistant-vacuum-styj02ym/pulls
Dzięki za pomoc i podpowiedzi, pomogło odkurzacz jest we władzy HA ![]()
Nie napisałem co instaluję, ponieważ jest w tytule wątku a nie chciałem śmiecić, obiecuję poprawę.
Faktycznie wątek długi.
Dzięki za naprowadzenie przeczytałem i widzę że stosując rozszerzenia społecznościowe spoza głównej gałęzi należy być czujnym i spodziewać się problemów.
Dziś jak mi głowa po nocnym czytaniu odpocznie to przeczytam jeszcze raz i … dzięki.
No to teraz jeszcze by wypadało napisać “dla potomnych” co konkretnie pomogło.
PS odpal sobie sambę, to z poziomu windowsa będziesz miał dostęp do pewnego ograniczonego obszaru HA w “otoczeniu sieciowym” i będziesz mógł grzebać w plikach konfiguracyjnych (a jako edytor np. notepad++ żebyś nie psuł linuxowych plików).
Pomogło to z pod podanego przez Ciebie linku.
A gdzie ten link? przecież tam jest prawie 100 forków, więc podaj link do tego, który działa.
Ha! niech żyje historia przeglądarek. On ci to jest (był ostatni na liście więc zadziałał przynajmniej u mnie)
Aktualizacji softu odkurzaczowi nie robiłem. Ma jak z fabryki, tzn. gada po polskiemu.
Cześć
Jestem nowy w temacie HA (więc proszę nie bijcie za jakieś ordynarne błędy  uczę się na błędach (własnych jakiś czas temu postawiłem HA na QNAP (VM), powoli dodaję następne urządzenia z domowej sieci, póki co wszystko działa. Udało mi się ostatnio dodać odkurzacz Viomi V2 pro, oraz dodać kartę mapy odkurzacza. Pytanie: jak zmienić skalę mapy tak aby była bardziej szczegółowa i miała większe powiększenie?
uczę się na błędach (własnych jakiś czas temu postawiłem HA na QNAP (VM), powoli dodaję następne urządzenia z domowej sieci, póki co wszystko działa. Udało mi się ostatnio dodać odkurzacz Viomi V2 pro, oraz dodać kartę mapy odkurzacza. Pytanie: jak zmienić skalę mapy tak aby była bardziej szczegółowa i miała większe powiększenie?
PS. czy w odkurzaczu da się zmieniać tryb z odkurzania na mopowanie? (nie znalazłem takiej opcji).
Masz to opisane w dokumentacji integracji GitHub - PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor: This custom integration provides a way to present a live view of a map for Xiaomi (Roborock/Viomi/Roidmi/Dreame) vacuums without a need for rooting.
Szukaj parametrów:
scale
sizes
Sorki ale dużo mi to nie mówi, przeczytałem już ten artykuł, ale w jakich plikach mam to skonfigurować? dla świeżaka to nie jest wszystko oczywiste (no offence)
Poniżej pełna konfiguracja w której znajdziesz to o czym pisałem.
camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
country: "de"
name: "My Vacuum Camera"
colors:
color_map_inside: [32, 115, 185]
color_map_outside: [19, 87, 148]
color_map_wall: [100, 196, 254]
color_map_wall_v2: [93, 109, 126]
color_grey_wall: [93, 109, 126]
color_ignored_obstacle: [0, 0, 0, 127]
color_ignored_obstacle_with_photo: [0, 0, 0, 127]
color_obstacle: [0, 0, 0, 127]
color_obstacle_with_photo: [0, 0, 0, 127]
color_path: [147, 194, 238]
color_goto_path: [0, 255, 0]
color_predicted_path: [255, 255, 0, 0]
color_cleaned_area: [127, 127, 127, 127]
color_zones: [0xAD, 0xD8, 0xFF, 0x8F]
color_zones_outline: [0xAD, 0xD8, 0xFF]
color_virtual_walls: [255, 0, 0]
color_new_discovered_area: [64, 64, 64]
color_no_go_zones: [255, 33, 55, 127]
color_no_go_zones_outline: [255, 0, 0]
color_no_mop_zones: [163, 130, 211, 127]
color_no_mop_zones_outline: [163, 130, 211]
color_charger: [0x66, 0xfe, 0xda, 0x7f]
color_robo: [75, 235, 149]
color_unknown: [0, 0, 0]
color_scan: [0xDF, 0xDF, 0xDF]
room_colors:
1: [240, 178, 122]
2: [133, 193, 233]
3: [217, 136, 128]
4: [52, 152, 219]
5: [205, 97, 85]
6: [243, 156, 18]
7: [88, 214, 141]
8: [245, 176, 65]
9: [252, 212, 81]
10: [72, 201, 176]
11: [84, 153, 199]
12: [133, 193, 233]
13: [245, 176, 65]
14: [82, 190, 128]
15: [72, 201, 176]
16: [165, 105, 18]
draw:
- charger
- path
- goto_path
- cleaned_area
- obstacles
- ignored_obstacles
- obstacles_with_photo
- ignored_obstacles_with_photo
- predicted_path
- no_go_zones
- no_mopping_zones
- vacuum_position
- virtual_walls
- zones
texts:
- text: "Room 1"
x: 25
y: 25
color: [125, 20, 213]
- text: "Room 2"
x: 25
y: 75
color: [125, 20, 213, 127]
font: "FreeSans.ttf"
font_size: 25
map_transformation:
scale: 2
rotate: 180
trim:
top: 10
bottom: 20
left: 30
right: 40
sizes:
charger_radius: 4
vacuum_radius: 6.5
obstacle_radius: 3
ignored_obstacle_radius: 3
obstacle_with_photo_radius: 3
ignored_obstacle_with_photo_radius: 3
attributes:
- calibration_points
- charger
- cleaned_rooms
- country
- goto
- goto_path
- goto_predicted_path
- image
- is_empty
- map_name
- no_go_areas
- no_mopping_areas
- obstacles
- ignored_obstacles
- obstacles_with_photo
- ignored_obstacles_with_photo
- path
- room_numbers
- rooms
- vacuum_position
- vacuum_room
- vacuum_room_name
- walls
- zones
scan_interval:
seconds: 10
auto_update: true
store_map: false
force_api: xiaomi
Wielkie dzięki, eksperymentuję, psuję i naprawiam, żeby znaleźć zależności, poligon ![]() .
.
A to nie tak że ten tryb jest dostępny jak zmienisz pojemnik na ten drugi z zestawu? o ile już nie zmieniłeś ![]()
![]()
Zmiany w configuration.yaml
cd config
nano cofiguration.yaml
Wyjście to Ctrl + x > enter > y
Nie żebym się czepiał do nano  ale dla początkujących (i nie tylko) idealnym rozwiązaniem jest addon
ale dla początkujących (i nie tylko) idealnym rozwiązaniem jest addon File editor umożliwiający wygodną edycję wszelkich plików konfiguracyjnych z GUI.
Ooo, zainstalowałem i muszę się temu przyjrzeć. Jakoś dziwnie mi się po nim nawiguje. Faktycznie wygląda na przyjazny, taki bardziej graficzny.
Oprócz gołego edytora jest parę użytecznych narzędzi w menu (“trybiku”).
Ten lewy panel czasem/często przeszkadza, zamyka się go ostatnią pozycją w menu (toggle HASS panel).
@rafkan a dał byś radę podzielić się konfiguracją karty od odkurzacza?
/
Skąd uzyskałeś taki sensor jak np. sensor.odkurzacz_last_clean_area?
Oczywiście, ale ja mam skromną kartę roborocka:
compact_view: false
entity: vacuum.odkurzacz
image: /local/RoborockS6.png
show_name: true
show_toolbar: true
stats:
cleaning:
- entity_id: sensor.odkurzacz_last_clean_area
subtitle: Obszar sprzątania
unit: m2
- entity_id: sensor.odkurzacz_last_clean_duration
subtitle: Czas sprzątania
unit: sekund
shortcuts:
- name: Sypialnia
service: script.igor_sypialnia
icon: mdi:bed-empty
- name: Salon
service: script.igor_salon
icon: mdi:sofa
- name: Kuchnia
service: script.igor_kuchnia
icon: mdi:silverware-fork-knife
- name: Przedpokój
service: script.igor_przedpokoj
icon: mdi:shoe-formal
type: custom:vacuum-card
show_status: true
Potrzebna Ci do w/w kodu jeszcze karta z Hacs: